
| Version 4 (modified by , 8 years ago) ( diff ) |
|---|
NAME
i.segment mean shift algorithm - Identifies segments (objects) from imagery data using mean shift algorithm.
KEYWORDS
SYNOPSIS
i.segment
i.segment [-dwap] group=name output=name [band_suffix=name] threshold=value [radius=value] [hr=value] [method=string] [similarity=string] [minsize=value] [memory=value] [iterations=value] [seeds=name] [bounds=name] [goodness=name] [--overwrite] [--help] [--verbose] [--quiet] [--ui]
Flags:
-d
Use 8 neighbors (3x3 neighborhood) instead of the default 4 neighbors for each pixel
-w
Weighted input, do not perform the default scaling of input raster maps
-a
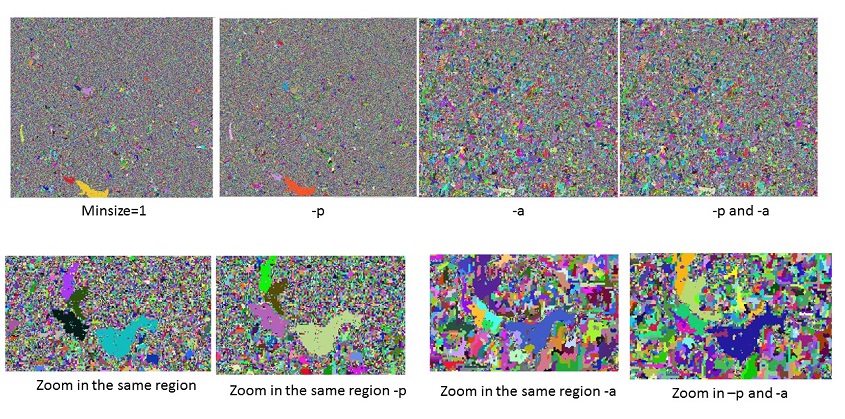
Use adaptive bandwidth for mean shift
Range (spectral) bandwidth is adapted for each moving window
-p
Use progressive bandwidth for mean shift
Spatial bandwidth is increased, range (spectral) bandwidth is decreased in each iteration
--o
Allow output files to overwrite existing files
--h
Print usage summary
--v
Verbose module output
--q
Quiet module output
--qq
Super quiet module output
--ui
Force launching GUI dialog
PARAMETERS
group=name [required]
Name of input imagery or imagery group
output=name [required]
Name of output segmentation map
threshold=value [required]
Difference threshold between 0 and 1 Threshold = 0 merges only identical segments; threshold = 1 merges all
band_suffix=name
Suffix for output bands with shifted mean value
radius=value
spatial bandwidth in number of cells
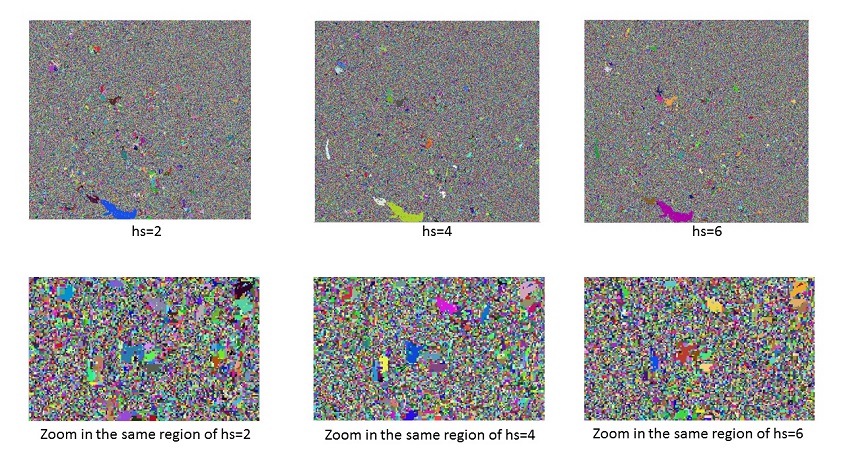
hr=value
range bandwidth in number of cells
method=string
Segmentation method Options: region_growing, mean_shift, watershed
similarity=string
Similarity calculation method Options: euclidean, manhattan Default: euclidean
minsize=value
Minimum number of cells in a segment The final step will merge small segments with their best neighbor Options: 1-100000 Default: 1
memory=value
Memory in MB Default: 300
iterations=value
Maximum number of iterations during the mean shift process
seeds=name
Name for input raster map with starting seeds
bounds=name
Name of input bounding/constraining raster map
goodness=name
Name for output goodness of fit estimate map
--overwrite
Boolean if overtie the existing raster
--ui
run with the user interface mode
--help
--verbose
--quiet
DESCRIPTION
GRASS GIS has the i.segment which provides the possibility to segment an image into objects. This is a basic step in object-based image analysis (OBIA). Currently, the module only provides one segmentation algorithm: region-growing. The code of i.segment was structured in a way that allows addition of other algorithms. It would be more useful and comprehensive to add mean-shift to the i.segment module.
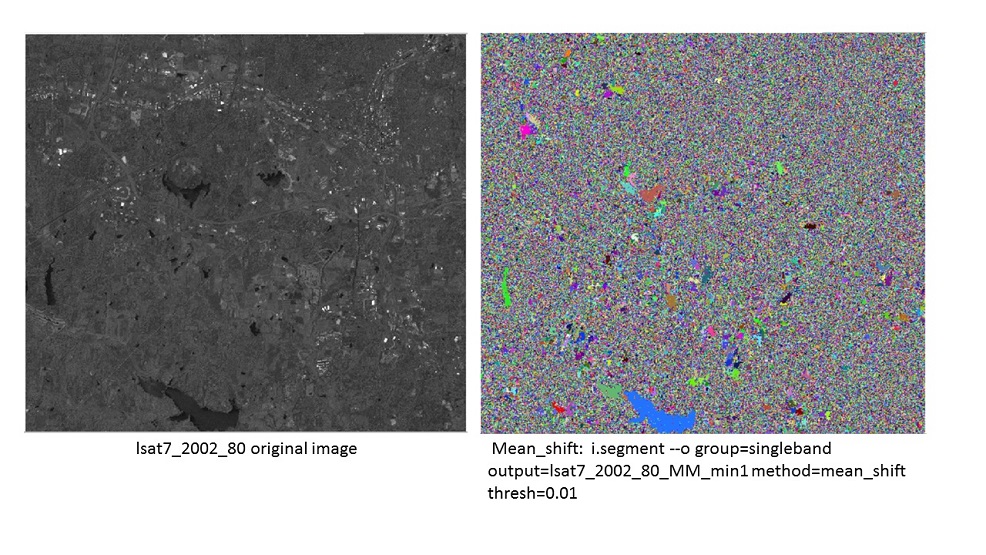
Mean shift segmentation is a local homogenization technique that is very useful for damping shading or tonality differences in localized objects. For the algorithm implementation of this case, basically the algorithm replaces each pixel with the mean of the pixels in a range-r neighborhood and whose value is within a distance d. The Mean Shift usually has 3 important parameters: 1) A distance function for measuring distances between pixels. Usually the Euclidean distance, but any other well-defined distance function could be used. The Manhattan Distance is another useful choice sometimes. 2) A radius (spatial bandwidth). All pixels within this radius (measured according the above distance) will be accounted for the calculation. 3) A value difference (range bandwidth). From all pixels inside radius r, we will take only those whose values are within this difference for calculating the mean.
Attachments (7)
- New_MS_Fig1.jpg (251.0 KB ) - added by 8 years ago.
- New_MS_Fig2.jpg (199.3 KB ) - added by 8 years ago.
- New_MS_Fig5.jpg (213.8 KB ) - added by 8 years ago.
- New_MS_Fig4.jpg (234.5 KB ) - added by 8 years ago.
- New_MS_Fig6.jpg (237.7 KB ) - added by 8 years ago.
- New_MS_Fig3.jpg (211.9 KB ) - added by 8 years ago.
- MultiBands_MS_Fig7.jpg (223.1 KB ) - added by 8 years ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip